归一化(Normalization)
目的:
- 应用层面需要统一量纲
- 在使用梯度下降发求解最优化问题时,归一化或标准化后可以加快梯度下降的求解速度,即提升收敛速度
- 可以避免神经元饱和。神经元的激活在0或1时会饱和,这些区域梯度几乎为0,这样的话在反向传播的时候局部梯度也会接近0。因此归一化可以有效缓解梯度消失
- 避免数据中小的数值被大数值吞噬,也避免数值太大引发的数值问题。(输入图像的值)
为什么要归一化
假设w1在[-10,10],w2在[-100,100],梯度每次都前进一个单位,则w1在搜索全局最优时会相对来说走的更『快』。即提高了收敛速度
归一化类型
线性归一化

标准归一化

归一化后均值为0,标准差为1,$ \mu $ 为左右样本数据的均值,$\sigma$ 是所有样本数据的标准差。
批归一化(Batch Normalization)
在网络中间对数据进行归一化
优点
- 减少对超参数的依赖,某些情况下可以取消Dropout方法或者L2正则项参数
- 减少对学习率的要求(加强对学习率参数的鲁棒性)
- 破坏原来的数据分布,一定程度上缓解过拟合,防止每批训练中某一个样本经常被选中
- 减少梯度消失(数据分布奇怪使激活函数输入接近0或者1,梯度很小)
算法流程
$x_{i}$是上一层的输出结果,B和Y是学习参数
- 计算上一层输出数据的均值

- 计算上一层输出数据的标准差

进行归一化处理,得到

分母加一个极小值防止除0
重构

gamma和beta是可学习参数。此时的均值是计算所有批次的mu_{beta}值的平均值得到的,标准差是每个批次的标准差的无偏估计。
和组归一化比较(Group Normalization)
如果batch比较小,导致估计的值和整个数据集的真实均值方差差距较大,BN的误差就会很大。
GN是将通道(channel)分成组,在每组内计算归一化的均值和方差,其准确度在各种批量大小下都很稳定
和权重归一化比较(weight normalization)
WN是对网络权重W进行归一化,适用于RNN,因为RNN处理的队列是变长的,基于时间状态计算,很难保存每个状态下的均值和方差,效率很低。
适用范围
适用于batch较大,数据分布比较接近的场景,不适用于动态网络和RNN结构。
- 允许较大的学习率
- 减弱对初始化的强依赖性,降低权重初始化的困难
- 保持隐藏层中数值的均值,方差不变,控制数据的分布范围,避免梯度消失和梯度爆炸
- BN可以起到和dropout一样的正则化效果,在正则化方面,一般全连接层用dropout,卷积层拥BN
- 缓解内部协变量偏移问题,增加训练速度
BN存在的问题
- 每次是在一个batch上计算均值、方差,如果batch size太小,则计算的均值、方差不足以代表整个数据分布。
- batch size太大:会超过内存容量;需要跑更多的epoch,导致总训练时间变长;会直接固定梯度下降的方向,导致很难更新。
梯度方向推导

背诵版本:

训练和测试时的区别:

常用的归一化层

BN代码实现,以及多卡训练的sync_bn
用numpy实现BN:
1 | import numpy as np |
BN 的性能和 batch size 有很大的关系。batch size 越大,BN 的统计量也会越准。然而像检测这样的任务,占用显存较高,一张显卡往往只能拿较少的图片(比如 2 张)来训练,这就导致 BN 的表现变差。一个解决方式是 SyncBN:所有卡共享同一个 BN,得到全局的统计量。
单卡上的 BN 会计算该卡对应输入的均值、方差,然后做 Normalize;SyncBN 则需要得到全局的统计量,也就是“所有卡上的输入”对应的均值、方差。一个简单的想法是分两个步骤:
- 每张卡单独计算其均值,然后做一次同步,得到全局均值
- 用全局均值去算每张卡对应的方差,然后做一次同步,得到全局方差
但两次同步会消耗更多时间,事实上一次同步就可以实现

Layer Normalization
LN为了解决什么问题?
如果一个神经元的输入分布在神经网络中是动态变化的,比如循环神经网络(RNN),那么无法应用BN操作。因此,针对BN不适用于深度不固定的网络(RNN,sequeece长度不一致)的问题,LN针对单个训练样本进行归一化操作,即对每一个样本中多个通道(channel)进行归一化操作。
LN针对单个样本进行归一化操作。具体来说,对于输入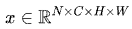 ,LN对每个样本的C、H、W维度上的数据求均值和方差,保留N维度。LN中不同的输入样本有不同的均值和方差。
,LN对每个样本的C、H、W维度上的数据求均值和方差,保留N维度。LN中不同的输入样本有不同的均值和方差。

LN的优势
不需要批训练,在单条数据内部机就能归一化。不依赖batch_size和输入sequence的长度,因此可以用于batch size为1和RNN中。LN用于RNN效果比较明显,但是在CNN上,效果不如BN。
1 | import torch |